
Program
Accepted papers
List of accepted papers.
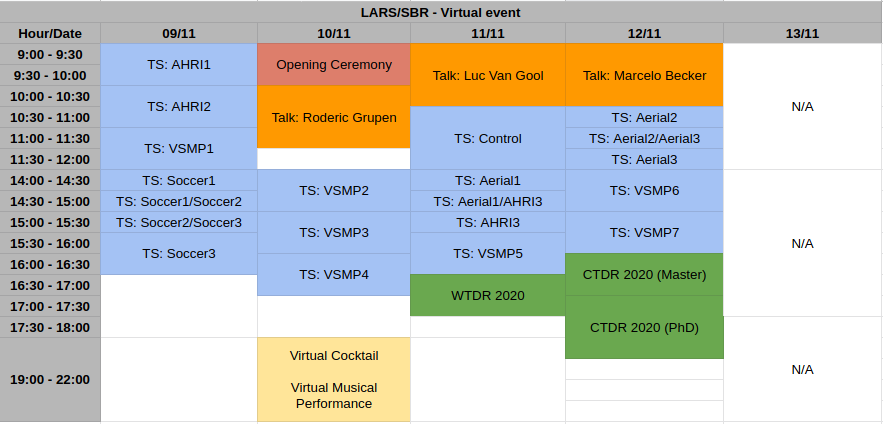
Calendar
Technical Sessions
| Hour | Technical Sessions | |
| TS: AHRI1 - Assistive Robotics and Human Robot Interaction 1 | ||
| 9:00 - 10:00 Session chair: Daniel Gamarra (UFSM) |
9:00 | - Intuitive and Modular Software Architecture for Functional Electrical Stimulation Rehabilitation (Guilherme Ricarte, Lucas Pinheiro, Antônio Bo) |
| 9:15 | - Robotic assistance for autism: a literature review (Isadora Ferrão, Roseli Romero, Josué Ramos, Hélio Azevedo) | |
| 9:30 | - Development of Human-Robot Communication Technologies for Future Interaction Experiments (Ana Campos, Bruno Adorno) | |
| 9:45 | - Aspects of Human-Robot Interaction in Autonomous Vehicles (Nicolas Rosa, Roseli Romero, Valdir Grassi Jr.) | |
| TS: AHRI2 - Assistive Robotics and Human Robot Interaction 2 | ||
| 10:00 - 11:00 Session chair: Josué J. G. Ramos (CTI) |
10:00 | - Proteger: A Social Robotics System to Support Child Psychological Evaluation (Hélio Azevedo, Diogo Godoi, Roseli Romero, Josué Ramos, Germano Beraldo Filho, Márcia Garcia) |
| 10:15 | - Human-robot interface for remote control via IoT communication using deep learning techniques for motion recognition (Dieisson Martinelli, Jonathan Cerbaro, André de Oliveira, Marco Teixeira) | |
| 10:30 | - ROSANA: Robot for Social Interaction in Unstructured Dynamic Environments (Pedro Paiva, Murillo Batista, Marcos Cruz, Germano Beraldo Filho, Josué Ramos) | |
| 10:45 | - A simulated environment for long-term interactions with episodic memory (Isaque de Souza, Hélio Azevedo) | |
| TS: VSMP1 - Vision, Sensing, Mapping and Path Planning 1 | ||
| 11:00 - 12:00 Session chair: João Fabro (UTFPR) |
11:00 | - WaiterBot: Comparison of Fuzzy Logic Approaches for Obstacle Avoidance in Dynamc Unmapped Environments Using a Laser Scanning System (LiDAR) (Jonathan Cerbaro, Dieisson Martinelli, João Fabro, Andre Schneider de Oliveira) |
| 11:15 | - Trajectory Generation Module Design for Robot Manipulators (Gabriel de Almeida Souza, Gustavo Souza Vieira Dutra, José Jean-Paul Tavares) | |
| 11:30 | - Intelligent Depth Control of Underwater Robots using Artificial Neural Networks and Reinforcement Learning (Wallace Bessa, Gabriel Lima, Lucas Cadengue) | |
| 11:45 | - Fast and Safe Path Planning Method for an Autonomous Smart Walker (Luís Nascimento, Joelson Rocha, Vitor Santos, Diego Pereira, Pablo Alsina, Anselmo Frizera-Neto) | |
| TS: Soccer1 - Robot Soccer 1 | ||
| 14:00 - 14:45 Session chair: Marcos Maximo (ITA) |
14:00 | - Dribbler and Kicker Systems to Small Size Soccer League Robots: A Study and Project to Latin American Robotics Competition (Joaquim Aragão, Marcos Eduardo, Caio Madelon Almeida Montarroyos, Luiz Arruda, Pedro Jorge Silva, Adam Pinto, Júlia Dias Tavares de Souza, João Cajueiro) |
| 14:15 | - Neural Network for a Curved Kicking Mechanism in a SSL Robot (Francisco Arthur Azevedo, Marcos Maximo, Daniela Vacarini de Faria) | |
| 14:30 | - An analysis of Reinforcement Learning applied to Coach task in IEEE Very Small Size Soccer (Carlos Pena, Mateus Machado, Mariana Barros, José Silva, Lucas Maciel, Edna Barros, Pedro Braga, Hansenclever F. Bassani) | |
| TS: Soccer2 - Robot Soccer 2 | ||
| 14:45 - 15:30 Session chair: Paulo Rosa (IME) |
14:45 | - Push Recovery Strategies through Deep Reinforcement Learning (Dicksiano Carvalho Melo, Marcos Maximo, Adilson Cunha) |
| 15:00 | - Deep Reinforcement Learning for Humanoid Robot Behaviors (Alexandre Muzio, Marcos Maximo, Takashi Yoneyama) | |
| 15:15 | - Comparison of sampling-based path planners for Robocup Small Size league (Felipe Celso, Marcos Maximo, Takashi Yoneyama) | |
| TS: Soccer3 - Robot Soccer 3 | ||
| 15:30 - 16:15 Session chair: TBD |
15:30 | - Decision-making For 5x5 Very Small Size Soccer Teams (Thayna Pires Baldão, Marcos Maximo, Cecilia Cesar) |
| 15:45 | - A Data Analysis Graphical User Interface for RoboCup 2D Soccer Simulation League (Felipe Nunes, Mateus Soares) | |
| 16:00 | - Deep Reinforcement Learning Applied to IEEE Very Small Size Soccer Strategy (Thiago Filipe de Medeiros, Takashi Yoneyama, Marcos Maximo) | |
| Hour | Technical Sessions | |
| TS: VSMP2 - Vision, Sensing, Mapping and Path Planning 2 | ||
| 14:00 - 15:00 Session chair: Orivaldo Santana (UFRN) |
14:00 | - Distributed MAS with Leaderless Consensus to Job-Shop Scheduler in a Virtual Smart Factory with Modular Conveyors (Alex Sousa, Andre Oliveira) |
| 14:15 | - Shortest path methods for automated warehouse applications (Kelen Vivaldini, Marcelo Becker) | |
| 14:30 | - Autonomous Navigation System for a Wall-painting Robot based on Map Corners (João Soares,Gabriel Fischer, Gustavo Lima, Marco Meggiolaro) | |
| 14:45 | - An Open-Design Warehouse Mobile Robot (Rhaian Barros, Jorge Silva, João Silva, Tiago Nascimento) | |
| TS: VSMP3 - Vision, Sensing, Mapping and Path Planning 3 | ||
| 15:00 - 16:00 Session chair: Valdir Grassi Junior (USP/SC) |
15:00 | - Deep Reinforcement Learning for Visual Semantic Navigation with Memory (Iury Santos, Roseli Romero) |
| 15:15 | - Comparative Evaluation of Feature Descriptors Through Bag of Visual Features with Multilayer Perceptron on Embedded GPU System (Alexandra Raibolt, Alberto Angonese, Paulo Fernando Rosa) | |
| 15:30 | - Performance Analysis of Code-Based Relative GPS Positioning as Function of Baseline Separation (Gustavo Carvalho, Felipe Silva, Rogério Menezes, Victor Pereira) | |
| 15:45 | - Visual Predictive Control Scheme for a Mobile Robot Navigating in a Cluttered Environment (Adrien Durand-Petiteville, Viviane Cadenat) | |
| TS: VSMP4 - Vision, Sensing, Mapping and Path Planning 4 | ||
| 16:00 - 17:00 Session chair: Vinicius Menezes (FURG) |
16:00 | - Triaxial accelerometer calibration using an extended two-step methodology (Rogério Menezes, Felipe Silva, Leonardo Vieira) |
| 16:15 | - A Study on Global Path Planners Algorithms for the TurtleBot 3 Robot in ROS (Pedro Assis Brasil) | |
| 16:30 | - Monitoring and Analysis of Compensatory Trunk Movements with RGB-D Camera and Wireless System for Rehabilitation of Upper Limbs (Alice Garcia, André Kelbouscas, Vinicius Oliveira, Sibyla Andreuchetti, Leonardo Guimaraes) | |
| 16:45 | - Depth Completion with Morphological Operations: An Intermediate Approach to Enhance Monocular Depth Estimation (Raul Mendes, Eduardo Ribeiro, Nicolas Rosa, Valdir Grassi Junior) | |
| Hour | Technical Sessions | |
| TS: Control - Control and Robotic Systems | ||
| 10:30 - 12:00 Session chair: Eduardo Todt (UFPR) |
10:30 | - Performance Evaluation of Propulsion Control Techniques for Autonomous Sailboat (Davi Santos, Luiz Gonçalves) |
| 10:45 | - Multiple Dynamic Perimeter Surveillance by an Autonomous Robot (Vítor Barros, Douglas Macharet) | |
| 11:00 | - Gain-Scheduled Robust Recursive Lateral Control for Autonomous Ground Vehicles Subject to Polytopic Uncertainties (Jose Bueno, Kaio Rocha, Marco H. Terra) | |
| 11:15 | - A Left-inverse Non-linear Controller to a RRR Manipulator (Samaherni Dias, Kurios Queiroz, Igor Lopes) | |
| 11:30 | - Kinematic Analysis of Planar 5R Symmetrical Parallel Manipulator Using an Interval Approach (Fabian Molina,Edson H. Koroishi) | |
| TS: Aerial 1 - Aerial Vehicles 1 | ||
| 14:00 - 14:45 Session chair: Milena Faria (CEFET-RJ) |
14:00 | - A Novel Concept for Hybrid Unmanned Aerial Underwater Vehicles Focused on Aquatic Performance (Alexandre Horn, Pedro Pinheiro, César Silva, Armando Neto, Paulo Drews Jr, Ricardo Grando) |
| 14:15 | - Gps Spoofing: Detecting GPS Fraud in Unmanned Aerial Vehicles (Isadora Ferrão, Kalinka Castelo Branco, Sherlon Silva, Daniel Figatto) | |
| 14:30 | - Towards a Double Hybrid VTOL UAV System (Luiz Gonçalves, Alysson Lucena) | |
| TS: AHRI 3 - Assistive Robotics and Human Robot Interaction 3 | ||
| 14:45 - 15:30 Session chair: Daniel Tozadore (USP/SC) |
14:45 | - A Simulated Environment for the Development and Validation of an Inspection Robot for Confined Spaces (André Cid, Mateus Coelho, Maurício Sathler, Frederico Sousa, Jacó Domingues, Mario Torres, Héctor Azpúrua, Gustavo Freitas) |
| 15:00 | - Security on ROS: analyzing and exploiting vulnerabilities of ROS-based systems (Rafael Teixeira, Paulo Lilles Drews Jr, Igor Maurell) | |
| 15:15 | - A Brazilian Sign Language Video Dataset for Automatic Recognition (Priscila Santino, Wesley Passos, Gabriel Araujo, Amaro de Lima, Jonathan Gois, Anna Regina Corbo) | |
| TS: VSMP 5 - Vision, Sensing, Mapping and Path Planning 5 | ||
| 15:30 - 16:30 Session chair: Pablo Alsina (UFRN) |
15:30 | - System for Recognition of Facial Expressions Using Machine Learning (Tharcio Silva, Natalia da Silva, Alexsandra Andrade) |
| 15:45 | - Convolutional Neural Network with Inception-like Module for Ball and Goalpost Detection in a Small Humanoid Soccer Robot (Lucas Steuernagel, Marcos Maximo, Carlos A. Sanches, Lucas Pereira) | |
| 16:00 | - A Comparison Between Three Different Parameterizations to Represent Planes For the Mapping Step of Direct Visual SLAM Approaches (Filipe Lins, Orcilano Luz, Adelardo Medeiros, Pablo Alsina) | |
| 16:15 | - A comparative Evaluation of Learned Feature Descriptors on Hybrid Monocular Visual SLAM Methods (Hudson Bruno, Esther Colombini) | |
| Hour | Technical Sessions | |
| TS: Aerial 2 - Aerial Vehicles 2 | ||
| 10:30 - 11:15 Session chair: Douglas Macharet (UFMG) |
10:30 | - Onboard Instability Correction of a Flying Wing Unmanned Aerial Vehicle (Alysson Lucena, Luiz Gonçalves) |
| 10:45 | - An Evolutionary Algorithm for Drone Trajectory Optimization in Aerial Challenges (Adson Alves, Murillo Ferreira, Esther Colombini, Alexandre Simões) | |
| 11:00 | - Deep Reinforcement Learning for Mapless Navigation of Unmanned Aerial Vehicles (Ricardo Grando, Junior Jesus, Paulo Drews Jr) | |
| TS: Aerial 3 - Aerial Vehicles 3 | ||
| 11:15 - 12:00 Session chair: Milena Faria (CEFET-RJ) |
11:15 | - Performance Indices-based Tuning for Barometer-aided Inertial Navigation Systems (Leonardo Vieira, Felipe Silva, Rogério Menezes, Lucas Paiva) |
| 11:30 | - Path-following problem solved by a NMPC controller applied to a UAV (Tiago Santa Maria, Guilherme Pusssente, André Marcato, Eduardo Aguiar) | |
| 11:45 | - Visual-based Autonomous Unmanned Aerial Vehicle for Inspection in Indoor Environments (Ricardo Grando, Nicolas Bortoluzzi, Pedro Miranda Pinheiro, César Bastos da Silva, Mariana Piñeiro, Vivian Misaki Aoki, Armando Neto, Otávio Zauk) | |
| TS: VSMP 6 - Vision, Sensing, Mapping and Path Planning 6 | ||
| 14:00 - 14:45 Session chair: Gustavo Freitas (UFMG) |
14:00 | - Investigation of Visual Reconstruction Techniques Using Mobile Robots in Confined Environments (Rafael da Silva, Thiago Rocha, Hector Azpurua, Gustavo Pessin, Armando Neto, Gustavo Freitas) |
| 14:15 | - Cooperative Training of Triplet Networks for Cross-Domain Matching (Giovanni Giacomo, Matheus Machado, Paulo Drews Jr, Silvia Botelho) | |
| 14:30 | - Alternative Underwater Image Restoration Based on Unsupervised Learning and Autoencoder with Degradation Block (Claudio Mello Jr., Silvia Botelho, Paulo Drews Jr) | |
| TS: VSMP 7 - Vision, Sensing, Mapping and Path Planning 7 | ||
| 14:45 - 15:30 Session chair: Ricardo Rodrigues (FURG) |
14:45 | - Underwater Depth Estimation Based on Water Classification using Monocular Image (Edwilson Vaz, Everson Toledo, Paulo Drews Jr) |
| 15:00 | - A Passive Vision System for Inspection Weld Bead Textures in Underwater Environments (Luciane Soares, Débora Paula, Patrick Baldez, Silvia Botelho, Ricardo Rodrigues, Danubia Espíndola) | |
| 15:15 | - Estimating Human Body Orientation Using Skeletons and Extreme Gradient Boosting (Pedro Paiva, Murillo Batista, Josue Ramos) | |